RealSense D435 와 L515 를 사용하기 위해
ubuntu 22.04 에 RealSense Viewer를 설치하는 과정입니다.
먼저 ubuntu 업그레이드를 해줍니다.
sudo apt-get update && sudo apt-get upgrade
공식 git 을 clone 합니다.
git clone https://github.com/IntelRealSense/librealsense.git
필요한 라이브러리 패키지를 다운받습니다.
sudo apt-get install libssl-dev libusb-1.0-0-dev libudev-dev pkg-config libgtk-3-dev cmake
Ubuntu 18/20/22 버전에서는 아래 명령을 수행하여 추가 패키지를 설치합니다.
sudo apt-get install libglfw3-dev libgl1-mesa-dev libglu1-mesa-dev at
librealsense 디렉토리로 들어가서 Intel Realsense 권한 스크립트를 실행합니다.
cd librealsense
sudo ./scripts/setup_udev_rules.sh
Ubuntu 20/22(focus/jammy) 에서는 아래 명령을 통해 패치된 커널 모듈을 빌드하고 적용합니다.
./scripts/patch-realsense-ubuntu-lts-hwe.sh
다음과 같이 계속할거냐고 묻습니다.

저는 무시하고 진행해주었습니다.
추적 모듈이 제대로 작동하려면 hid_sensor_custom 커널 모듈이 필요합니다.
이를 위해 부팅 중에 드라이버를 로드하도록 설정합니다.
echo 'hid_sensor_custom' | sudo tee -a /etc/modules
CMake를 실행합니다.
데모 및 튜토리얼과 함께 librealsense를 구축합니다.
mkdir build && cd build
cmake ../ -DBUILD_EXAMPLES=true
make -j$(nproc)
sudo make install
시스템이 로컬 라이브러리를 찾을 수 있도록 추가하는데
이미 되어있으시다면 생략하셔도 됩니다.
echo 'export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/usr/local/lib' >> ~/.bashrc
source ~/.bashrc
정상적인 설치가 완료되었는지 테스트를 실행해봅니다.
realsense-viewer
성공적으로 설치되었습니다.

그럼 먼저 USB로 Intel RealSense D435 를 연결해보겠습니다.
우측의 Add Source 를 눌러보니 자동으로 감지가 되어 있었습니다.
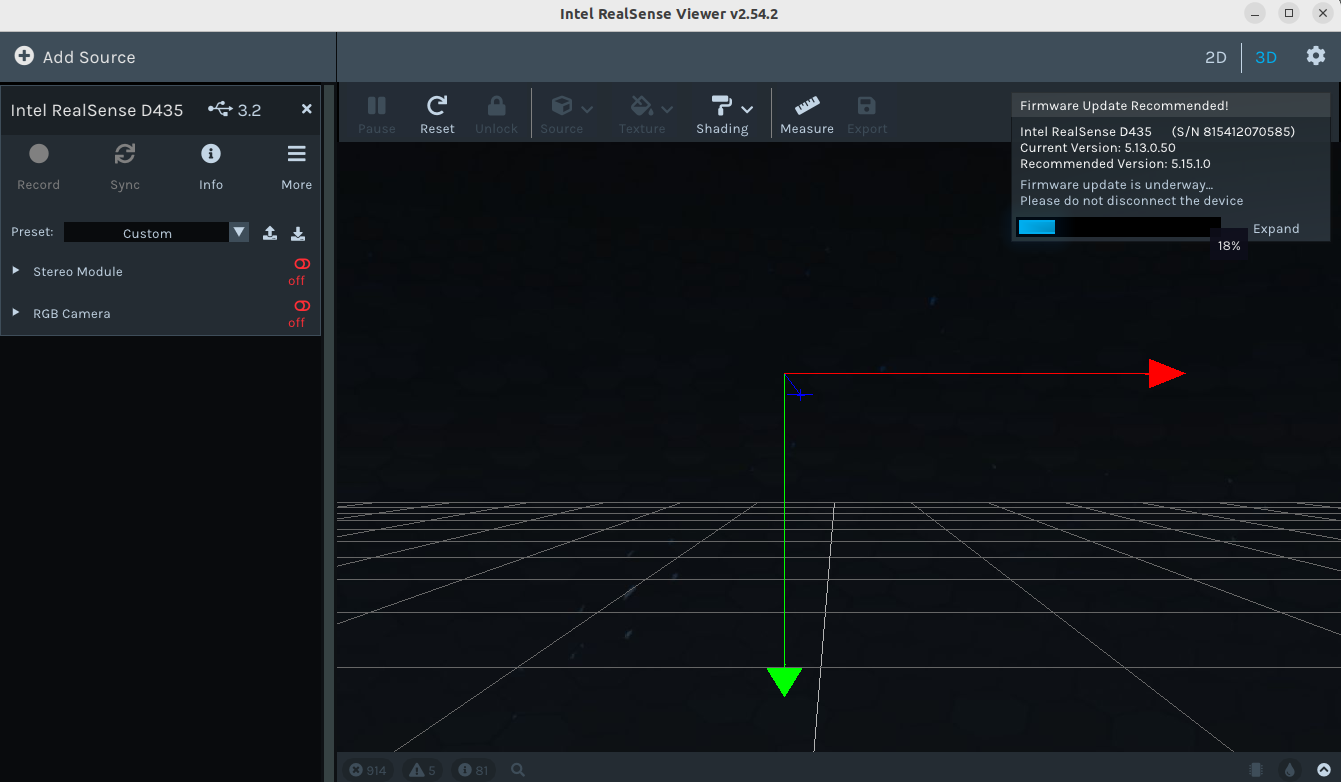
우측 상단에 뜨는 펌웨어를 업그레이드 해주었습니다.
초기 상태에서는 아래 두 모드가 off 가 되어있는 것을 확인하실 수 있습니다.
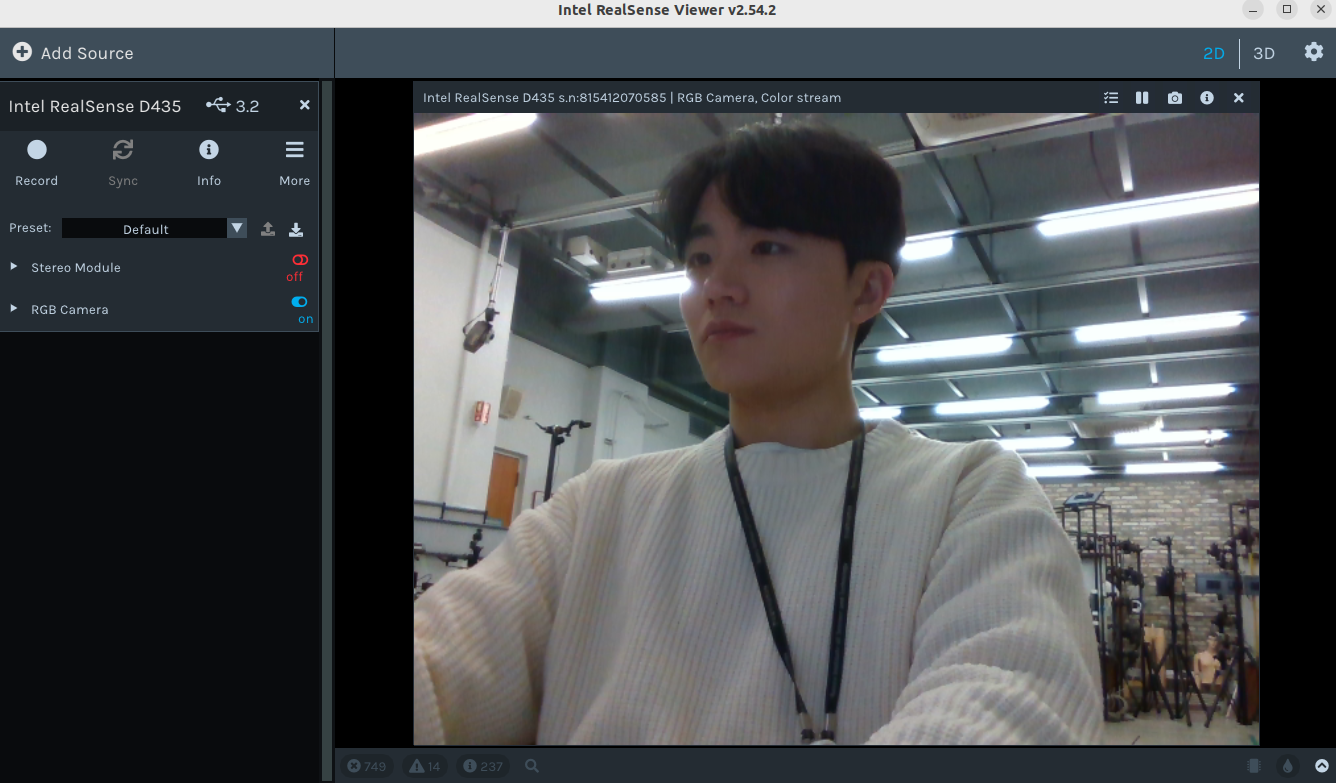
2D로 전환한 상태에서 RGB 카메라를 켜면
웹캠과 같이 카메라 화면이 출력됩니다.
이 때는 Depth camera를 사용하지 않아서 3D 기능이 지원되지 않습니다.
이제 Stereo를 켜보겠습니다.

두 개의 화면이 나타나면서 depth 정보가 표시됩니다.
우측 상단에 3D 로 전환하면 Depth camera 화면이 3d 공간에 나타나게 됩니다.

이제 color 이미지로 변경해보겠습니다.
texture 메뉴를 선택하고 color 옵션을 선택합니다.

드래그해서 옆모습을 보니 그렇게 정확하진 않습니다.

그럼 이번엔 L515 라이다를 통해 동일하게 수행해보겠습니다.
USB 3.0 포트여야 정상적으로 인식이 됩니다.
먼저 RGB입니다.
가격이 비싸서 그런지 화질이 훨씬 좋네요

Depth Sensor 를 켜니 Depth camera와 함께 infrared stream 가 나타납니다.
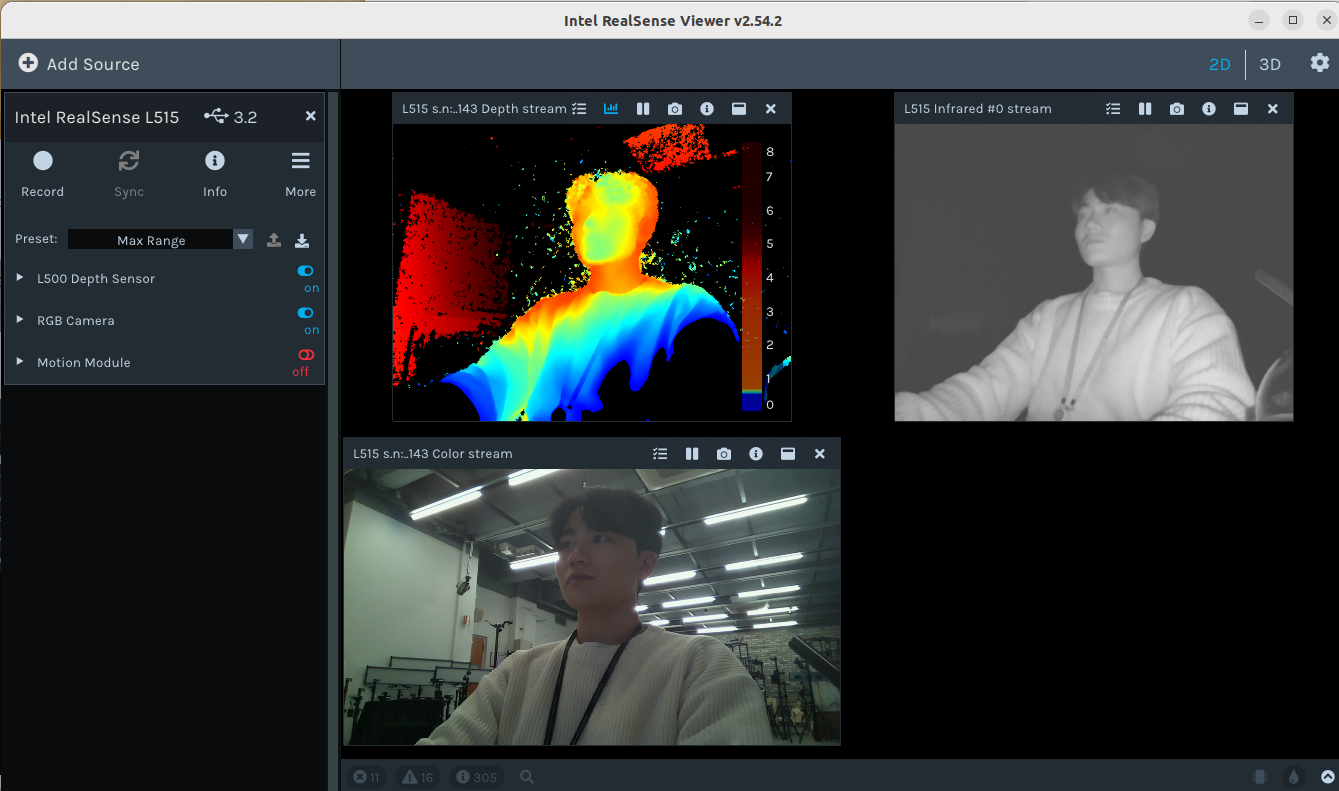
확실히 Depth 성능이 좋아진게 보입니다.
또한 라이다와 너무 가까운 물체는 표현되지 않았습니다.

4m가 떨어진 에어컨도 잘 출력되는 모습이 보입니다.

조금 왜곡이 있긴 하지만 상당히 디테일하게 Depth Camera 가 작동합니다.

구동 시 발열은 꽤 있습니다.
또한 lidar의 모션도 감지할 수 있으니 응용이 다양하게 가능할 것 같습니다.
다음 글에선 python OpenCV에서 Intel RealSense 를 이용해 스트림 창을 띄워보겠습니다.
Intel Realsense를 이용한 Python openCV 영상 처리
최종적으로 시각 정보를 사용하기 위해 Intel RealSense Viewer 를 사용할 것이 아니고, python3 openCV를 이용해서 RGB Stream과 Depth Stream 을 가져오고 python에서 정보를 처리하길 원했기 때문에 이를 구현한
cobang.tistory.com
'Setup & Example > Linux' 카테고리의 다른 글
| docker 설치 + NVIDIA docker 설치 + docker 사용법 (0) | 2024.01.15 |
|---|---|
| Linux(Ubuntu 22.04) conda 가상 환경에서 CUDA 를 위한 OpenCV, PyTorch, Torchvision 빌드 (2) | 2024.01.10 |
| Ubuntu 22.04 에서 CUDA 업그레이드 + cuDNN 설치 (0) | 2024.01.09 |
| Jetson Nano 에 yolov7 TensorRT 사전 환경 구성 (2) | 2023.12.26 |
| Window WSL 설치 + VS code 연동 (3) | 2023.12.23 |