Window 11 22H1 기준 WSL2 설치 방법에 대한 글입니다.
WSL, Ubuntu 설치
cmd를 열어 다음 명령어 입력
wsl --install


시스템을 재시작한다.
이후 window powershell에서
wsl --update명령어를 입력하는 것을 추천한다.
가끔씩 Gazebo 와 같은 프로그램에서 창이 깨지는 문제가 발생할 때가 있음
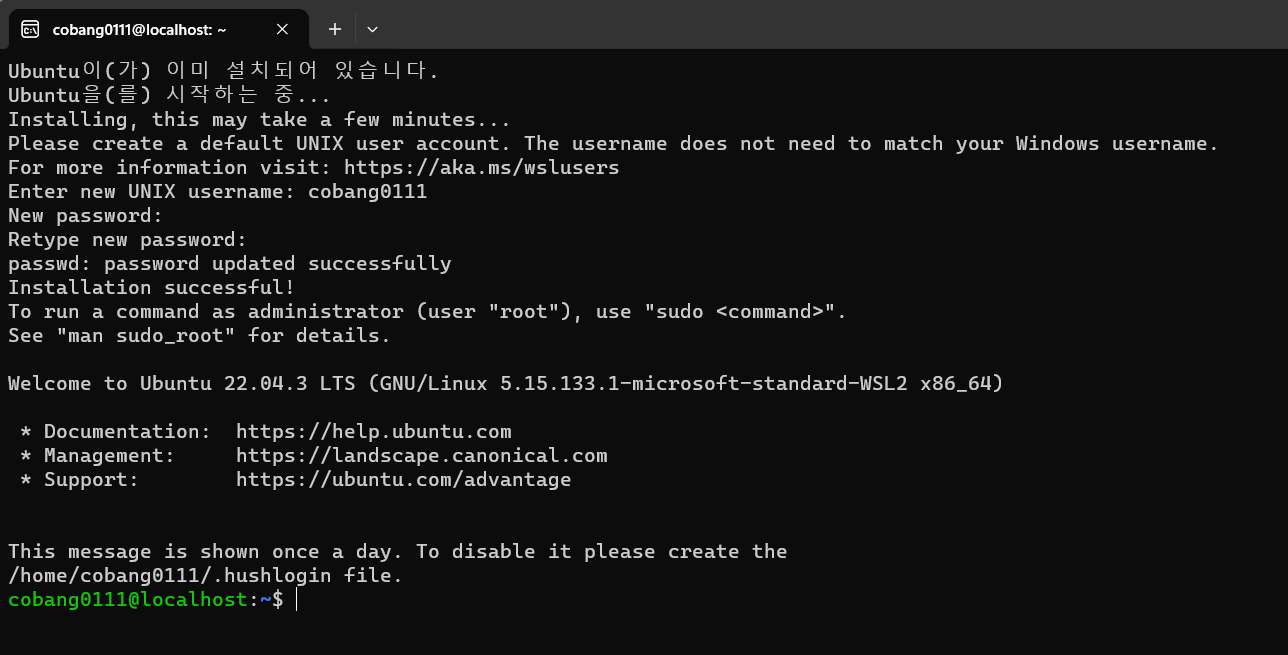
재시작하고 나면 이런 창이 뜬다.
UNIX user name을 설정하라고 한다.
앞으로 사용할 이름으로 입력한다

비밀번호는 입력해도 아무 것도 뜨지 않으니 두 번 동일하게 잘 입력한다.

성공하면 로그인이 된다. 내 컴퓨터에 Linux(Ubuntu 22.04.3) 가 성공적으로 설치되었다.
VScode 에서 Linux 환경 실행을 위한 WSL 설치
Extension 에서 Install 눌러 설치한다.
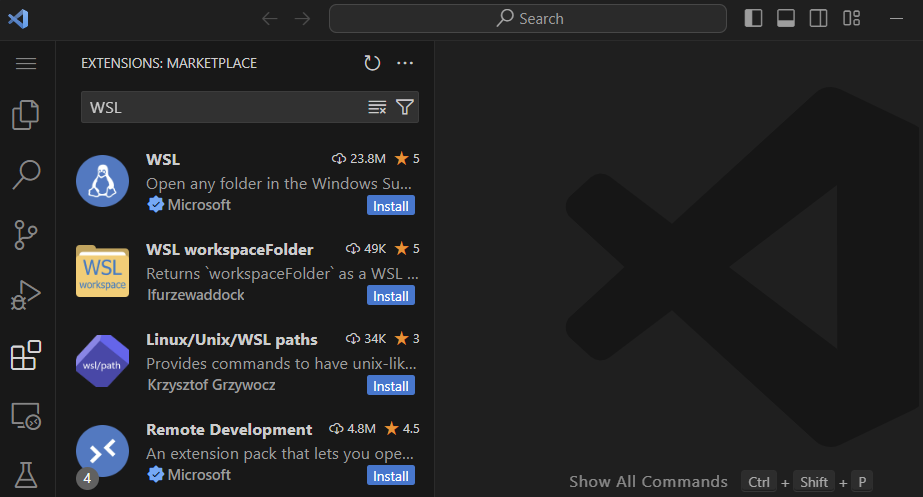
설치가 완료된다.

방금 띄워뒀던 ubuntu Linux 화면에서 다음과 같이 입력한다.
만약 닫아버렸다면 윈도우에서 WSL 앱을 다시 실행하면 된다.
code .
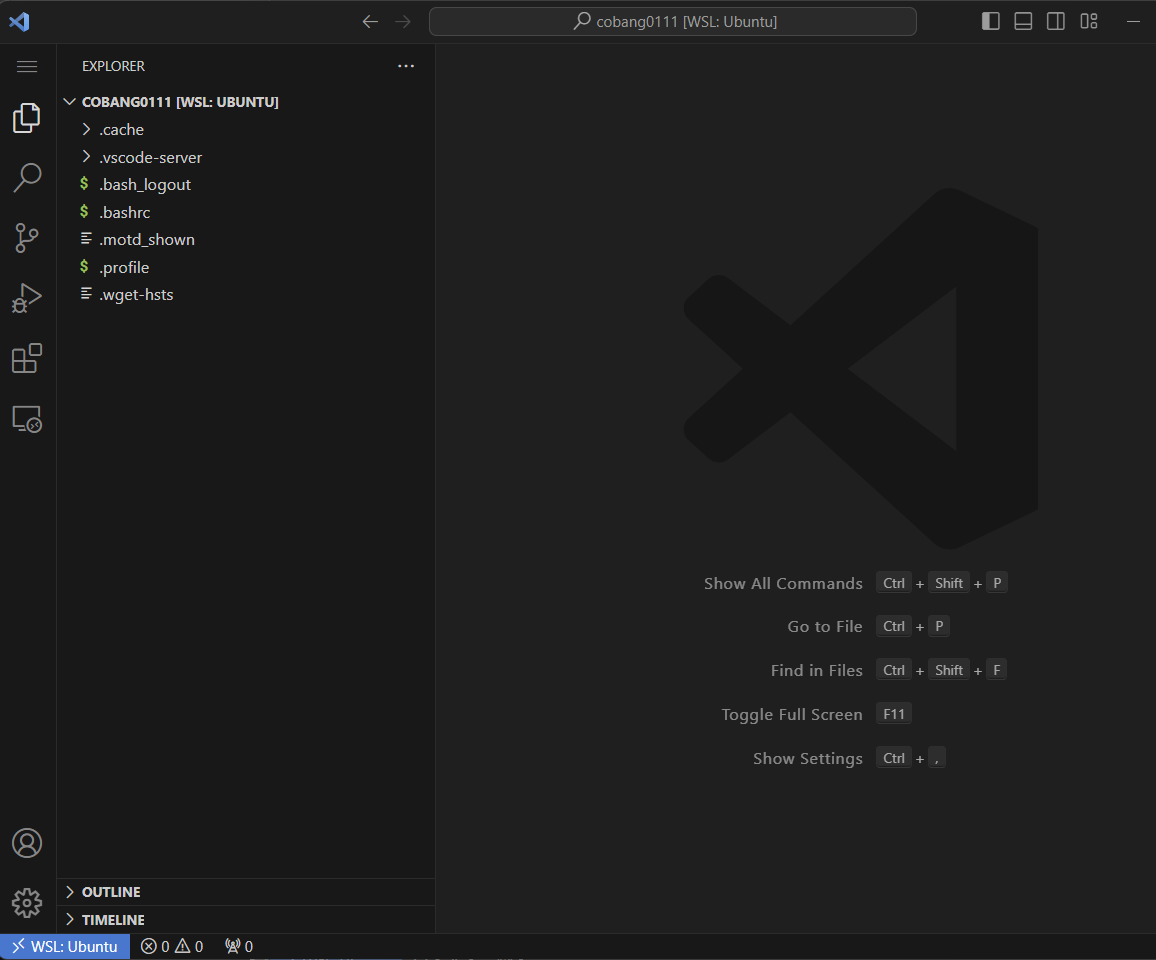
설치가 완료되었다.
저절로 VScode 에서 아래와 같은 창이 뜬다.

체크 표시해주고 trust 버튼 눌러주었다.
현재 상태는 WSL 환경에 연결되어 있는 상태이다.
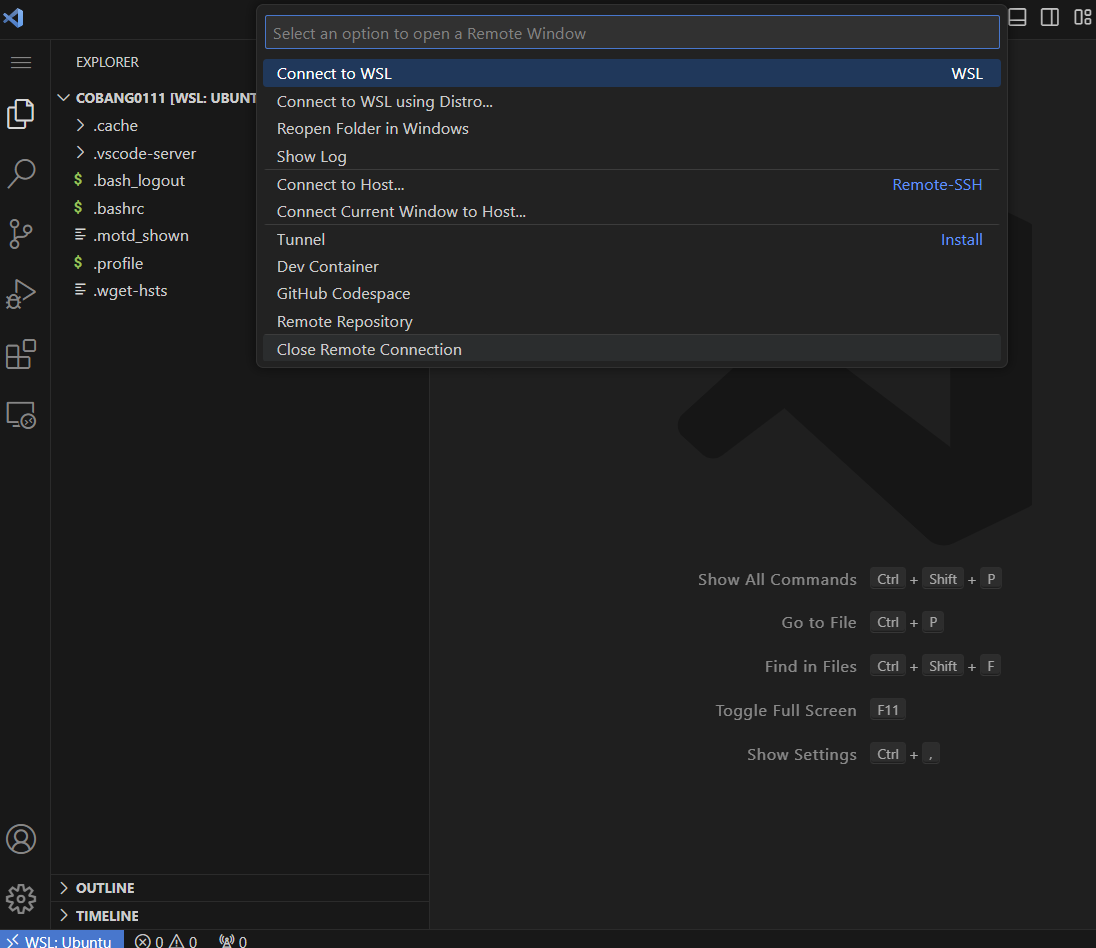
상단 가운데 검색창을 누르고,
Close Remote Connection 을 누르면 WSL과의 연결이 해제되고
window 환경에서 VScode를 사용할 수 있다.
다시 연결하려면 왼쪽 모니터 아이콘 (Remote Explorer)을 눌러 원하는 환경에 다시 연결할 수 있다.

좌측 상단의 ≡ 버튼을 눌러 New Terminal 을 열 수 있다.

이제 이 터미널에서 명령을 수행시킬 수 있다.


Reference
WSL 설치
wsl --install 명령을 사용하여 Linux용 Windows 하위 시스템을 설치합니다. Ubuntu, Debian, SUSE, Kali, Fedora, Pengwin, Alpine 등 원하는 Linux 배포판에서 실행되는 Windows 머신에서 Bash 터미널을 사용할 수 있습니
learn.microsoft.com
Windows에서 WSL(Linux 개발 환경) 구축하기
Windows에서 WSL(Linux 개발 환경) 구축하기 Windows에서 Linux 개발 환경을 구성한 이유 회사에서 제공한 컴퓨터의 개발 환경은 Windows였고 우리의 메인 서비스들은 AWS 클라우드에 올라가다 보니 대부분
tech.cloud.nongshim.co.kr
AI로봇랩 1강) Windows WSL2에 ROS2 설치하기
Frenz AI로봇랩에서 ROS2 강의영상 입니다. ROS의 이론과 설치 (Windows WSL2)에 대해 다룹니다. https://youtu.be/AUSOnvOTt2s ROS2는 윈도우에서도 가능하다! ROS2를 윈도우에 설치하기 위한 3가지 방법 그냥 Window
keep-steady.tistory.com
WSL & WSL2 설치와 VSCode 연동하기
WSL과 WSL2 설치 및 Remote - WSL을 통한 VSCode와의 연동
velog.io
'Setup & Example > Linux' 카테고리의 다른 글
| docker 설치 + NVIDIA docker 설치 + docker 사용법 (0) | 2024.01.15 |
|---|---|
| Ubuntu 22.04 에 Intel RealSense Viewer 설치 (1) | 2024.01.10 |
| Linux(Ubuntu 22.04) conda 가상 환경에서 CUDA 를 위한 OpenCV, PyTorch, Torchvision 빌드 (2) | 2024.01.10 |
| Ubuntu 22.04 에서 CUDA 업그레이드 + cuDNN 설치 (0) | 2024.01.09 |
| Jetson Nano 에 yolov7 TensorRT 사전 환경 구성 (2) | 2023.12.26 |